This is a dual-resonant solid-state tesla coil (DRSSTC). A person being pushed on a swingset is a typical analogy for understanding tesla coil operation. The natural frequency of a swing is mostly determined by the length of the swing, and if a force or push is given to the person on the swing at this frequency at the right time, the amplitude of the swing's motion is increased. Now imagine that the force is applied not only when the person is swinging forward, but also when the person is swinging backward, to make the person go higher more quickly. Translating to tesla coils, electrical energy is precisely forced into the resonant system in order to generate high output power and spark length.
The primary inductor-capacitor circuit (copper tube spiral and white capacitor bank underneath) is physically tuned to have a resonant frequency close to the non-adjustable resonant frequency of the secondary inductor-capacitor circuit (the red shiny wire and aluminum toroids on top) to maximize efficiency of energy transfer. The primary's resonant frequency is electronically detected and used to send pulses of energy into the system at that frequency (approximately 67 kHz in this case), building up energy with every cycle until it is dissipated as an electric arc.
The tesla coil plays music by producing arcs at the frequency of the notes played on a guitar. The arc plasma heats and expands the surrounding air, effectively creating sound waves. For the tesla coil to produce a specific note, the analog signal from the guitar is converted to a digital MIDI signal via computer software. Then the digital signal is converted to a light pulse and sent to the tesla coil's controller board via a fiber optic cable; this ensures the signal is not disrupted by the electromagnetic field of the coil. Based on the light pulse signal and a current feedback signal from a current transformer on the primary circuit, the controller sends a square wave with specific pulse width to the gates of a full bridge of high-power IGBTs. This switches 340 Volts across the primary circuit at the desired frequency. Acting like an air-core transformer, the primary inductor transfers energy to the secondary winding, increasing the voltage until an arc is produced at the end of the breakout point on top of the toroids. Besides the controller (red) and pre-charge (green) circuit boards and the 24V power supply that runs them, the tesla coil was handmade from scratch.
Design inspired by Gao Guangyan's DRSSTC3: http://loneoceans.com/labs/drsstc3/#Design. Many thanks to Dan McCauley at Eastern Voltage Research for troubleshooting assistance.
Peak Power: 2.5 kW
Top Speed: 21 mph
Range: 9 miles
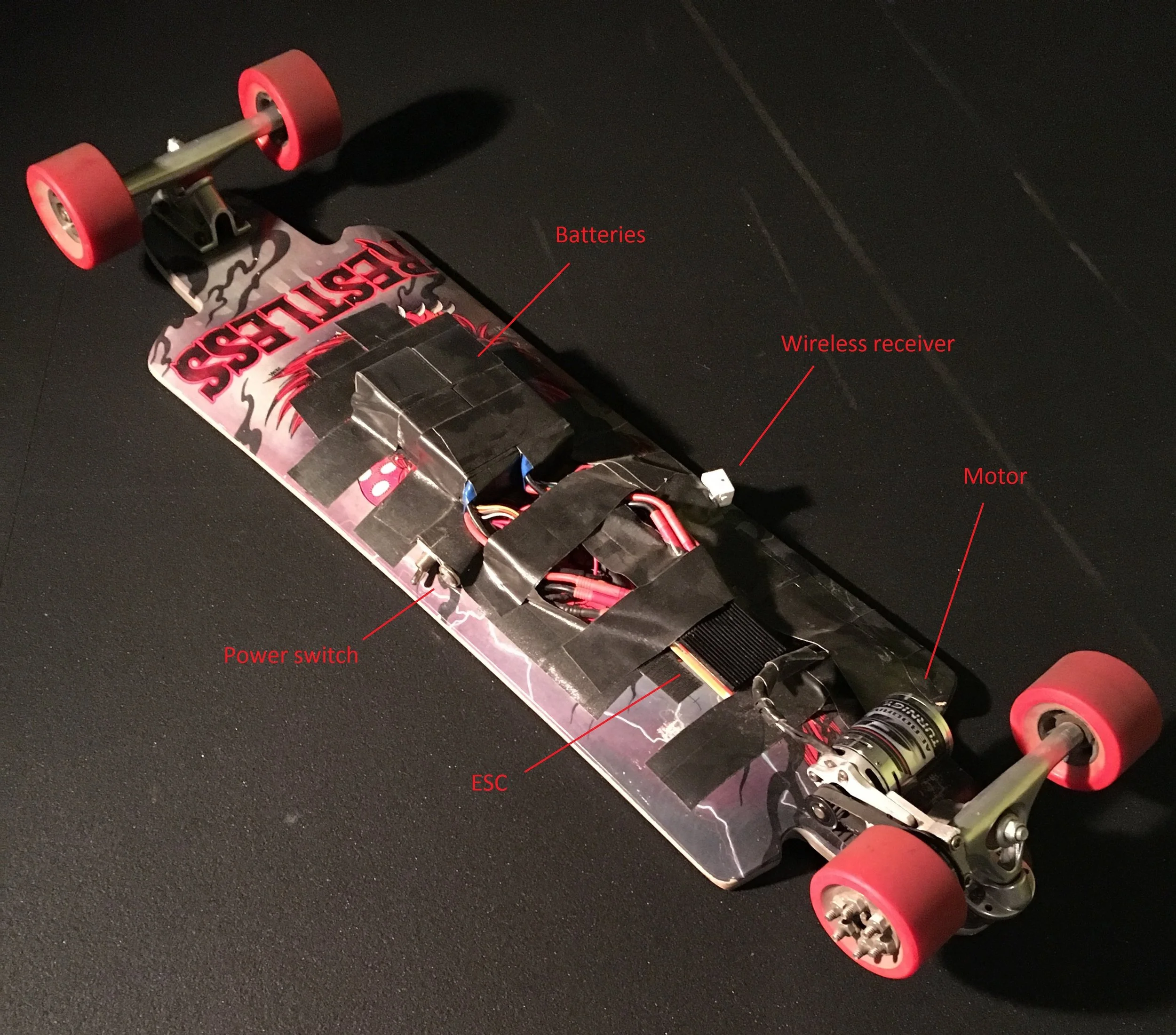
Wanting to get around campus more quickly than walking afforded, I set out to build an electric longboard. Relative to a standard skateboard, a longboard provided additional stability, while also giving extra room on the bottom for electronics. Two 4-cell, 5000 mAh, 25C LiPo batteries are in series providing energy to the entire system. Power transfers from the batteries to the electric motor via the electronic speed controller (ESC), which takes input signals from the wireless receiver and outputs electrical power to the 3-phase outrunner motor. The wireless receiver is powered by a 5V regulator coming off the batteries and receives signals from a wireless Wii nunchuck controller. The motor drives trapezoidal-groove timing pulleys with a 14:32 motor-to-wheel gear ratio.
A noteworthy component of the electrical system is a MOSFET power switch. If a simple mechanical switch was used to connect the batteries to the ESC, a spark would occur between the switch's contacts as the ESC's capacitors demand instantaneous current to charge up. Turning the longboard on and off over time would cause the spark to corrode the switch to the point of failure. The least expensive solution to correct this is to have a resistor with its own switch, which is turned on first, in parallel with the main on/off connectors, which are connected afterwards. This charges up the ESC's capacitors more slowly, preventing a spark, and once charged, the main connectors can be put directly in contact to bypass the power loss of the resistor during operation. Although inexpensive, this solution's drawback is that two operations must be performed in a critical order. Alternatively, putting the resistor in series with the main connectors would fix the spark problem at turn-on, but the resistor would generate too much heat and burn out upon normal operation of the board. A MOSFET power switch solved all these issues as there are no mechanical contacts where sparks can occur and a minimal resistance with waste energy dissipated by an included heatsink.
Peak power: 5 kW
Max speed: 36 mph (computer-limited to 21 mph)
Range: 11 miles
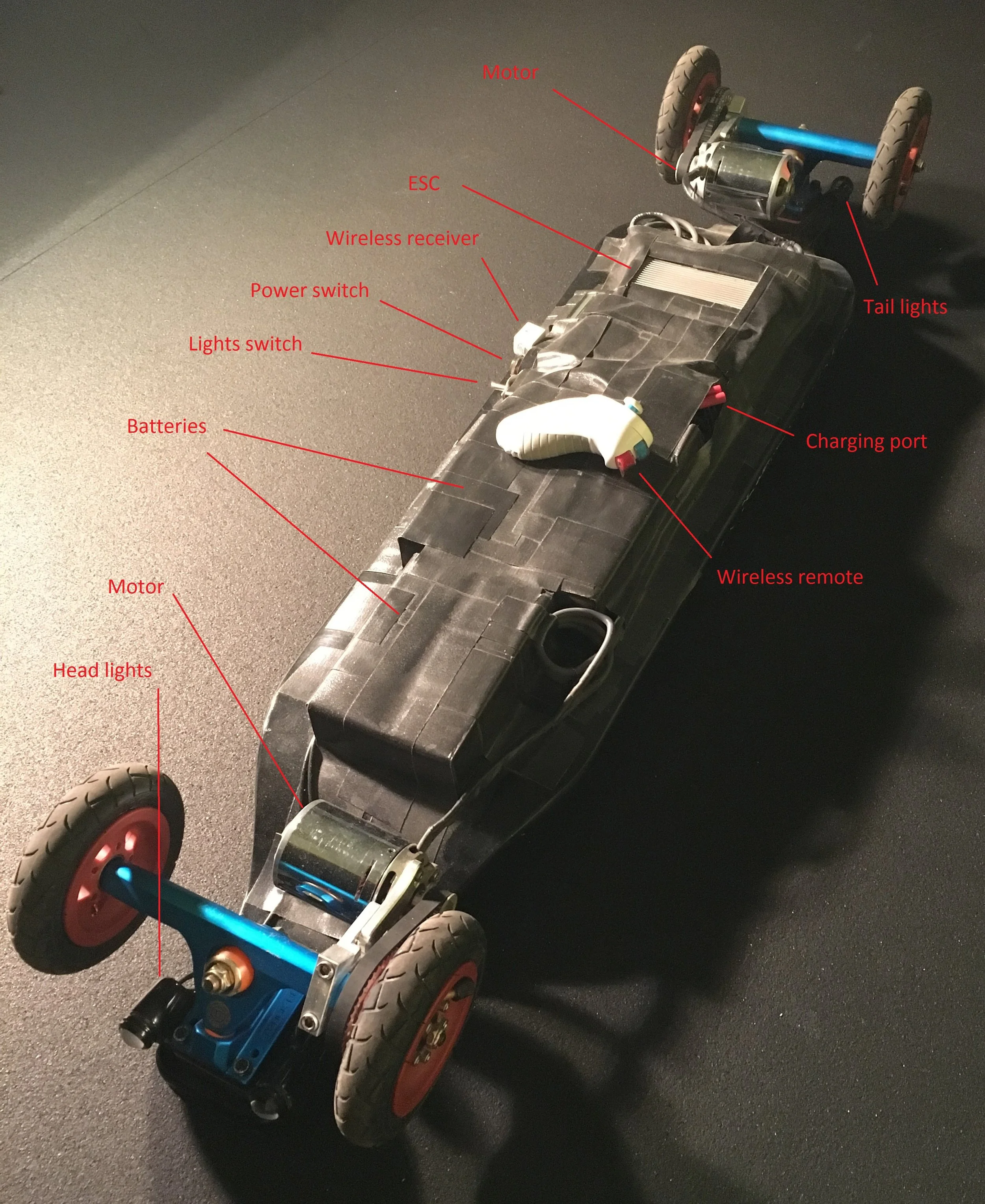
V2 of the electric longboard features several upgrades compared to V1. Some of them were inspired by riding V1 and noticing opportunities for improvement, while others were obvious necessities to make it worth investing time and money into making another board. Ride quality has been dramatically improved with pneumatic tires. Although these result in additionally friction, the ride is extremely smooth with little to no vibration felt in the user’s legs, which was a chief complaint while riding V1.
Having the LED head and tail lights in order to ride at night is one of the best features of V2, and figuring out how to create the dual functionality of strobe and continuous light switching was a challenging and rewarding exercise in circuit design. The LEDs are powered by a DC/DC converter, which brings the batteries' ~40 volts down to the 12 volts required for the LEDs. Separately, a "strobe circuit" was made using a 555 timer IC. The timer outputs rectangular pulses with a frequency adjustable via a potentiometer. The values of the resistors, capacitors, and potentiometer were chosen based on a desired operating frequency of 1-25 Hz. The timer's output pulses are sent to a power MOSFET, which switches the power from the DC/DC converter to the lights. Finally, a double-throw, double-pole toggle switch allows the lights to run in a strobe or continuous state with only one switch.
The electrical/mechanical system configuration is almost identical to V1, except V2 has two motors for twice as much torque. As a result, twice as much electrical power is needed to run the longboard at its full potential. Four 5-cell, 5000 mAh, 25C LiPo batteries are connected in series+parallel configuration to produce a 37 Volt, 10 Amp-hour power source. The same wireless controller and receiver are used to send throttle commands to a bigger ESC, which delivers power to two wheels with a 15:44 motor-to-wheel gear ratio. With an unsafe theoretical max speed of 36 mph, it was important to adjust the ESC’s settings to limit max power and top speed.
Another mechanical upgrade from V1 is the use of HTD (high torque drive) timing belts/pulleys. Compared to trapezoidal, HTD offers lower potential for belt/pulley slippage due to a deeper tooth, as well as less pressure on each tooth due to a larger contact surface area between the belt and the pulley. A "cosmetic" addition to the electrical system is a voltage monitor that displays the charge left in the batteries as a percentage, so the voltage does not have to be checked with a multimeter after each ride, unlike V1.
The golfball gun is the oldest featured project and the only purely mechanical project. It was also more of an exercise in construction, as opposed to newer projects, which required a larger engineering focus. The primary design optimization involved searching various spud gun forums for research on optimal barrel-to-chamber volume ratios at different pressures.
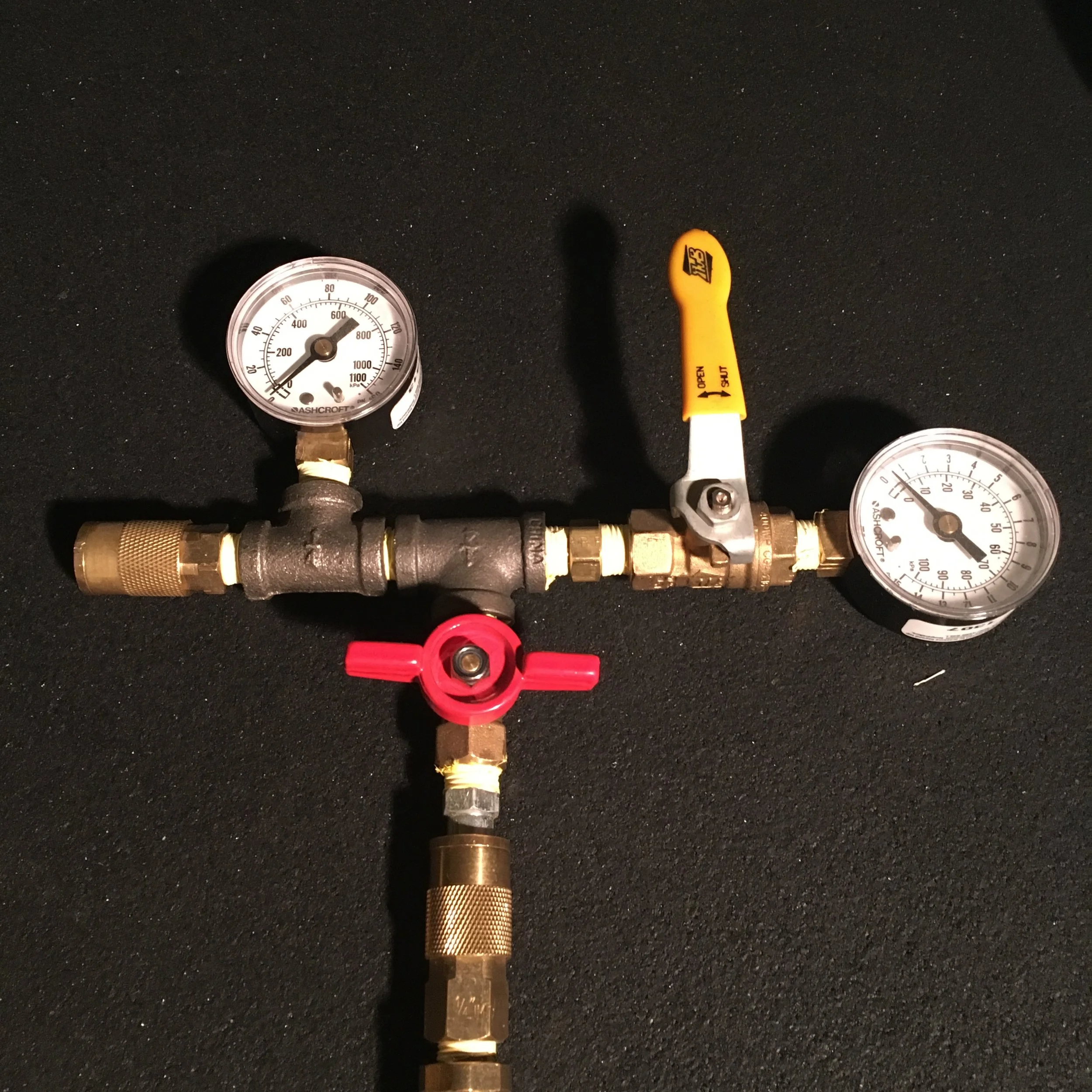
The gun, operating at a range of 40-100 PSI, fires a golfball by transferring pressurized air from the chamber (lower horizontal pipe) to the barrel (upper horizontal pipe) using a piston valve that operates in the upper, red T-junction. The piston, made of wood with rubber washers on both ends, is pushed against the barrel when air from an air compressor flows in through the brass ball valve, effectively sealing the barrel off from the air inflow while pressurizing the chamber.
A modified sprinkler valve featuring a thumb lever air gun attachment is the trigger. When the lever is pulled, air starts to flow out of the end of the air gun attachment, which creates a pressure differential within the sprinkler valve, allowing a diaphragm to lift and more air to flow out of the free end of the valve. This greater air flow out of the chamber creates a large enough pressure differential between the chamber and barrel to force the piston backwards and allow the rest of the pressurized air to escape into the barrel and shoot the golfball out.
The Bluetooth taser was developed to remotely fire the hybrid-combustion gun. Many homemade combustion guns, like a spudgun that uses combustible hairspray as propellant, utilize a grill igniter to create the spark necessary to fire a projectile. However, the hybrid gun would be igniting a much more powerful pressurized gas mixture, making a remote firing system ideal for safety reasons.
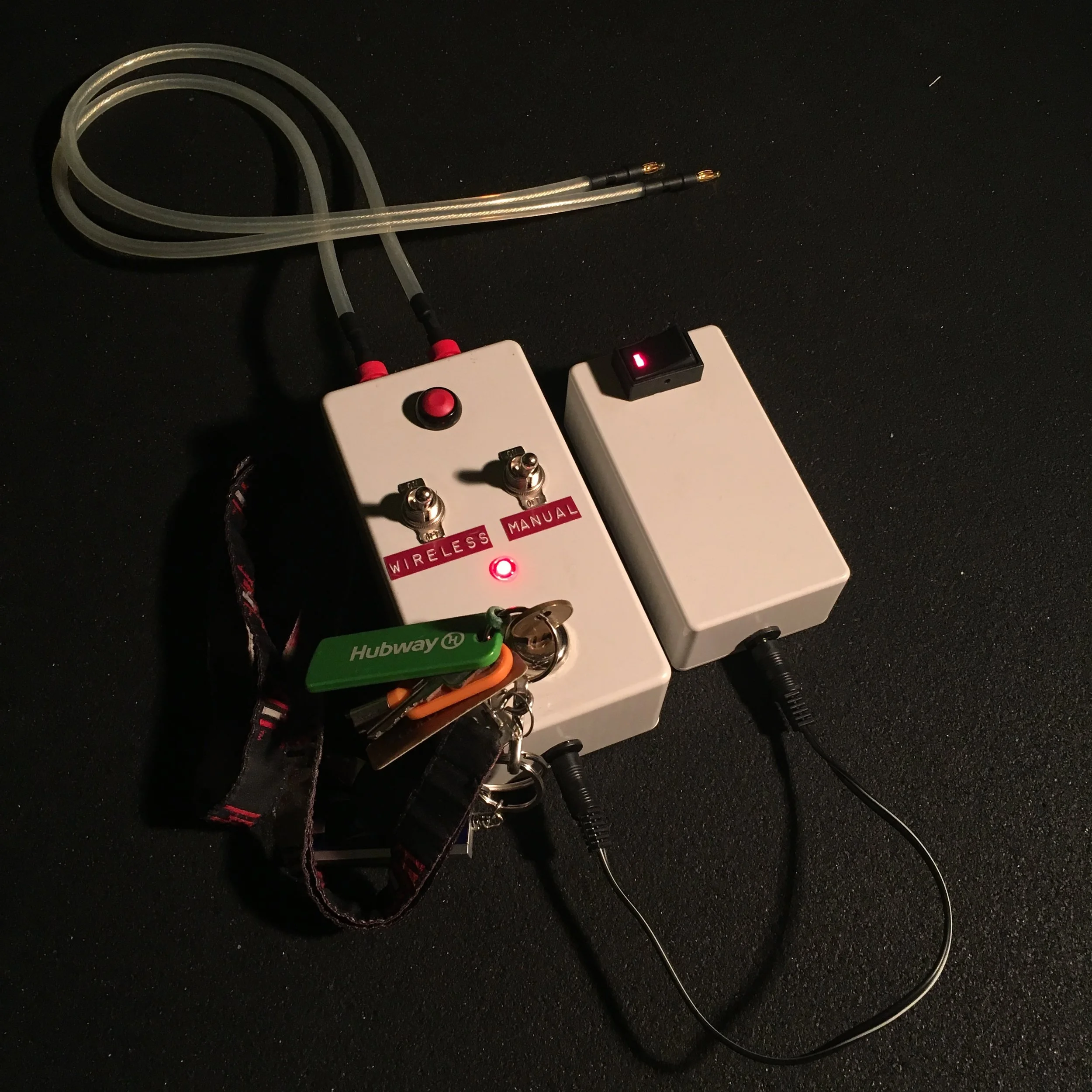
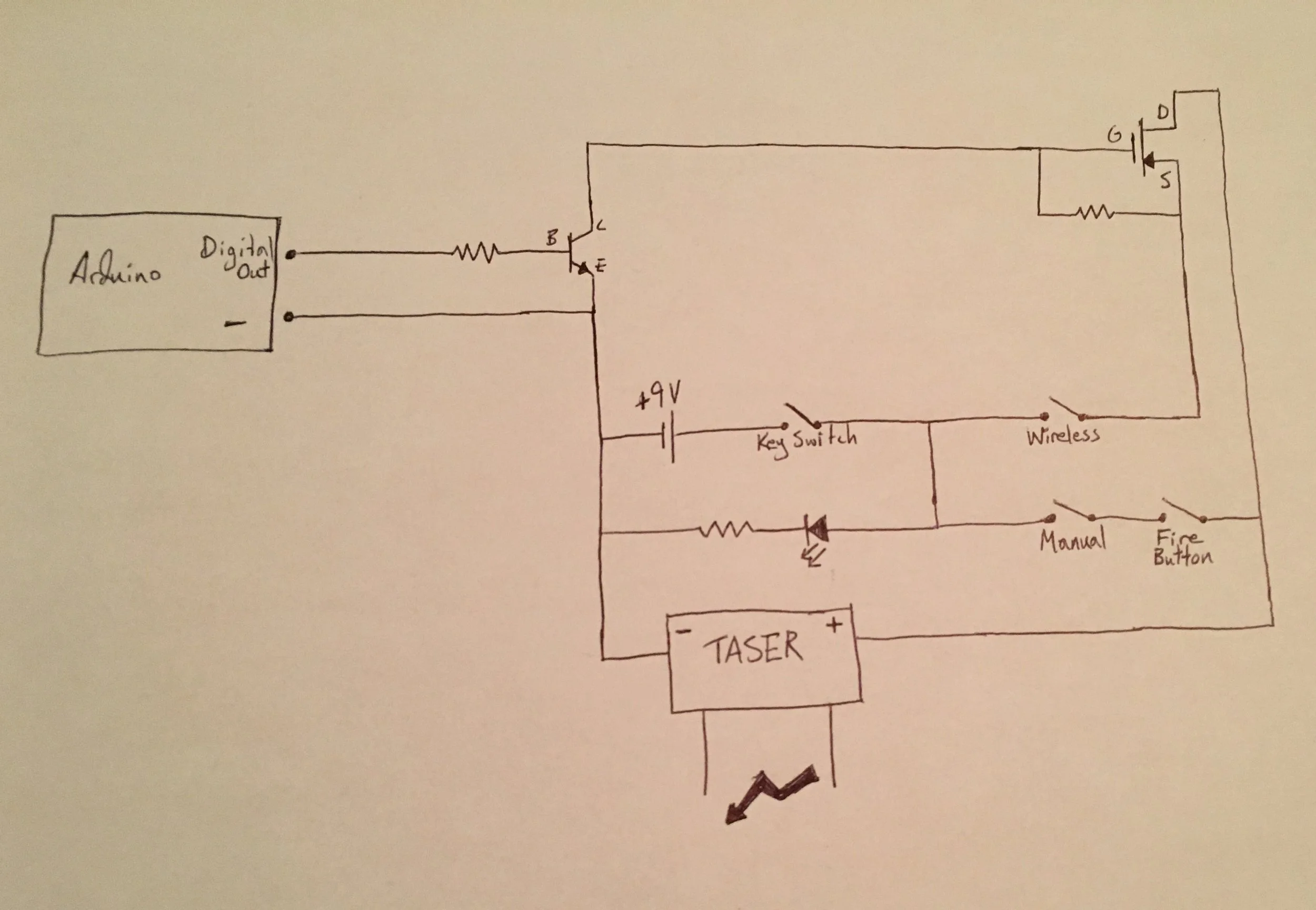
The solution is essentially a handheld taser converted to turn on via a Bluetooth signal from an iPhone. An iPhone app uses Bluetooth Low Energy (BLE) signals to communicate with a Bluetooth Arduino shield, located in the smaller project box. The Arduino then sends a signal to turn on the taser, creating a spark between the electrodes that are inserted into the gun’s chamber.
The wireless capability provided by the Arduino and its Bluetooth shield were put in a separate connectable project box to keep the main box smaller when wireless operation was not desired. In an ironic twist, wireless operation became always necessary due to a physical design flaw. As can be seen in the pictures to the right, the red manual firing button was mistakenly placed at the top of the box in between several thousands of volts of potential of the taser's electrodes. If the electrodes were not very close together during testing, pressing the fire button would send an internal spark to the button's terminals. The fire button was disconnected and insulated from the rest of the system.
Not satisfied with the strength of the golfball gun, I sought to make an even more powerful projectile cannon and came across hybrid guns. The word hybrid refers to how the gun utilizes compression and combustion to launch a projectile by igniting a pressurized fuel/air mixture. The golfball gun uses only compression, and standard aerosol spud guns use only combustion. Hybrid guns of this size can have firepower similar to actual rifles.
With no moving parts, the operation and construction of this gun was relatively straightforward. Unlike the golfball gun which uses a piston valve in order to keep the Bluetooth taser modulechamber pressurized, the hybrid gun simply uses a material that can be destroyed at high pressures. This burst disk, usually the wall of a soda can or several layers of aluminum foil, sits between the chamber and barrel. The burst disk can handle an input of up to 100psi of pressurized air and MAPP gas (which burns hotter than propane), but it quickly bursts when the fuel is ignited and hundreds of psi build up in the chamber. This explosion forces a steel ball bearing out of the barrel, which is not shown in the pictures. Different proportions of compressed air and MAPP gas are added to the chamber based on desired power output, and the gun is fired remotely using the Bluetooth taser module.
The challenge of this project was to create a remote method to pull a crossbow’s trigger. The solution that came to mind was a motor swinging a lever arm onto the trigger at the push of a button via an Arduino microcontroller. Given that the maximum distance that triggers can usually move is small (about half of an inch in this case), a stepper motor was used for its precision in shaft rotation/position. The primary mechanical constraint is that the motor needed to apply 4 pounds of force at the end of the lever arm to pull the trigger.
On the electrical side, the motor needed to be able to pull the trigger at a voltage and amperage that is within a motor driver board's specifications, while also being powered by a battery small enough to fit in a hand-held "remote" or project box. Given all of these constraints and the selection of LiPo batteries and stepper motors available, calculations estimated that the combination of a 2-cell (7.4V nominal), 1000 mAh Li-Po battery powering a bipolar, 200 steps/revolution, 7.4V, 1 A/phase stepper motor attached to a 1 inch lever arm swinging 23.4 degrees (0.41" arc length) would reliably get the job done.
The motor driver transfers power from the battery to the motor upon an Arduino command, and stepper motor code libraries conveniently already exist for programming interactions between the Arduino and motor. Pressing the red button on the remote sends a high signal to a digital input on the Arduino; the Arduino detects this change from low to high and tells the driver to rotate the motor shaft 13 steps, or 23.4 degrees. When the button is released and the digital input goes from high to low, the shaft then rotates 13 steps in the opposite direction. The Arduino and red LED are powered by a household 9V battery connected via the toggle switch.
Written in VBA, the analyzer queries Yahoo Finance for daily data back to 2008 for a desired stock, calculates millions of daily statistics of the stock and its trend (such as simple/exponential moving average, standard deviation, coefficient of variation, relative strength index, and more), and finally analyzes thousands of permutations of a desired strategy. The output of the analysis includes the dates, prices, and returns of trades using the permutation of the strategy that results in the highest average % return for longs, shorts, or all positions. Average standard deviation of return and length of trades are also provided.
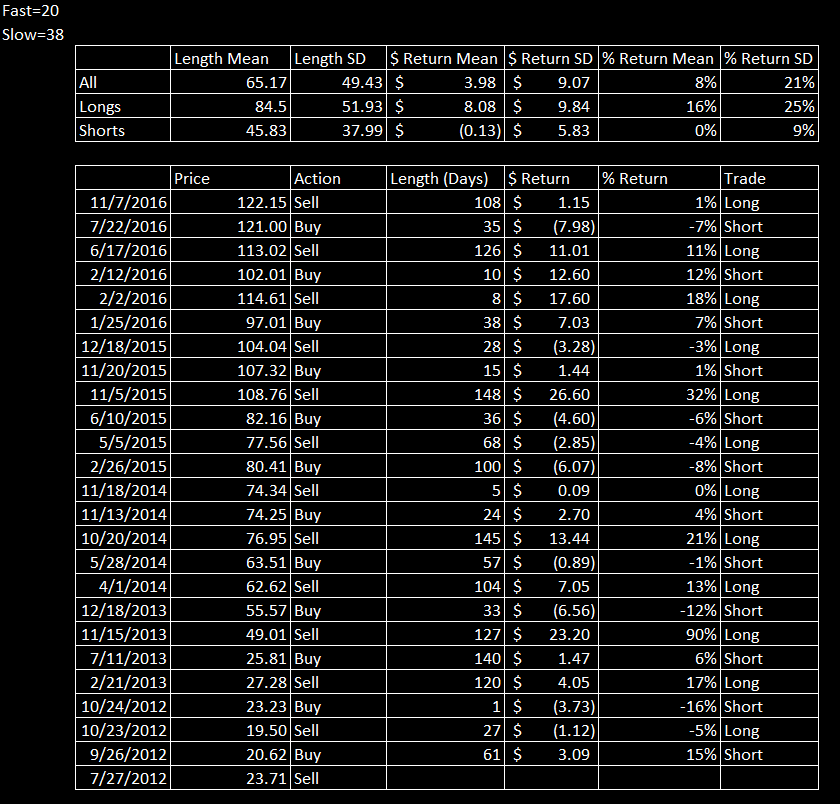
The main strategy programmed for analysis is a common one, the simple moving average crossover, which is shown in the candlestick graph. With 0 < x < y, a moving average using a rolling x-day period (orange, faster average) and a moving average using a rolling y-day period (blue, slower average) are calculated, and when the fast average crosses above the slow average, the stock is bought. When the fast average crosses back below the slow average, the stock is sold. The program finds these opportunities for all possible pairings of x and y, with y being a maximum of 100 days, and returns the x, y pairing that results in the highest average return per trade. The chart shows the output for this strategy on Facebook's stock (FB) from 2012 through 2016, with the recommended moving averages being a 20-day and 38-day. This results in an average long position held for 84.5 days returning 16%.
Clearly this analyzer is currently only useful at finding the most successful strategy retroactively. Future iterations of this program could include real-time predictive analysis of stocks and derivatives to detect opportunities in not only statistical trades (SMA/EMA crossover, Bollinger band, etc.), but also trades based on visual patterns (bull/bear flag, head and shoulders, etc.) Then it could automatically communicate with brokerage firm software to open and close positions and ideally generate positive income.